主宰者▲
早稲田大学 次世代ロボット研究機構 AIロボット研究所
基幹理工学部 表現工学科 尾形哲也研究室
研究院客員准教授/客員主任研究員
近況▲
Gangadhara Naga Saiが第40回日本ロボット学会学術講演会で以下の発表を行いました。- Gangadhara Naga Sai Gubbala, Masato Nagashima, Hiroki Mori, Young ah Seong, Hiroki Sato, Ryuma Niiyama, Tetsuya Ogata "Design of 3-dof 2-link inflatable collaborative robot arm with internal drop stitch structure"
日本ロボット学会第40回学術講演会, 2J2-01, 東京大学, 2022年9月6日(火)
- Hiroki Mori, Hyogo Hiruma, Hiroshi Ito , Tetsuya Ogata "Tool embodiment via Deep predictive active attention: Emergence of an attention module for “end-effector” regardless of a robotic body or a tool"
「深層予測動的注意モデルによる道具身体化:身体と道具に関わらない「エンドエフェクタ」注意モジュールの創発」
NEURO2022, 2O09a1-04, 第9会場 (ラグナガーデンホテル羽衣:中), 2022年7月1日(金)
メンバー▲
伊藤 洋(次世代ロボット研究機構AIロボット研究所 客員次席研究員/日立製作所)
Gangadhara Naga Sai(基幹理工学研究科表現工学専攻 修士課程)
飯野 寛人(基幹理工学研究科表現工学専攻 修士課程)
永島 督士(基幹理工学研究科表現工学専攻 修士課程)
伊藤 大介(基幹理工学部表現工学科)
大澤 将輝(基幹理工学部表現工学科)
内田 拓希(基幹理工学部表現工学科)
研究テーマと概要▲
・構成的発達科学に基づく胎児・新生児シミュレーション
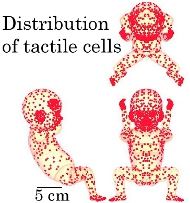
 人間の知性の起源を胎児に求めて,胎児から新生児にかけての発達を再現するコンピュータシミュレーションを行っています。開発した全身筋骨格モデルは、身体各部位の大きさや質量が胎児の在胎週数や週齢に合わせて決める事ができ、約200本の筋と約1500個の触覚細胞等が配置され、子宮内や床の上の環境で胎児モデルや新生児モデルを物理シミュレーションに基づいて行動させる事ができます。全身筋骨格モデルと神経系モデルが結合されて身体構造と環境が胎児・新生児の運動と感覚により結び付き、神経系の自己組織的な変化にしたがって行動が変化していきます。
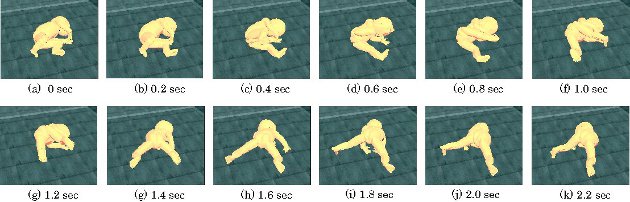
人間の知性の起源を胎児に求めて,胎児から新生児にかけての発達を再現するコンピュータシミュレーションを行っています。開発した全身筋骨格モデルは、身体各部位の大きさや質量が胎児の在胎週数や週齢に合わせて決める事ができ、約200本の筋と約1500個の触覚細胞等が配置され、子宮内や床の上の環境で胎児モデルや新生児モデルを物理シミュレーションに基づいて行動させる事ができます。全身筋骨格モデルと神経系モデルが結合されて身体構造と環境が胎児・新生児の運動と感覚により結び付き、神経系の自己組織的な変化にしたがって行動が変化していきます。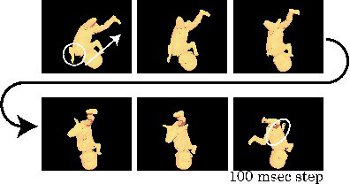 このモデルにより、明示的な制御を行っていないにもかかわらず、胎児モデルにおいて超音波により観察される胎児行動の一部が現れることや,新生児モデルにおいて寝返りやハイハイのような運動も現れることを確認しました。これは身体形状や触覚細胞分布、筋配置等の身体的な制約条件が行動を導いていることを示唆した結果と考えられ、発達を身体や環境が導いている可能性を示しています。
このモデルにより、明示的な制御を行っていないにもかかわらず、胎児モデルにおいて超音波により観察される胎児行動の一部が現れることや,新生児モデルにおいて寝返りやハイハイのような運動も現れることを確認しました。これは身体形状や触覚細胞分布、筋配置等の身体的な制約条件が行動を導いていることを示唆した結果と考えられ、発達を身体や環境が導いている可能性を示しています。現在、早産児に対する療育は理論的根拠の薄いままに試行錯誤的に進められています。このような研究を進めて行く事で、胎児、早産児、新生児を包括する発達原理が明らかになれば、早産児や発達障害への療育研究も体系的に取り組めるようになるのではないかと期待しています。
発表論文等(最近のみ)▲
学術雑誌(査読有)
- Hyogo Hiruma, Hiroshi Ito, Hiroki Mori, and Tetsuya Ogata, "Deep Active Visual Attention for Real-time Robot Motion Generation: Emergence of Tool-body Assimilation and Adaptive Tool-use,"
- Hiroshi Ito, Kenjiro Yamamoto, Hiroki Mori, and Tetsuya Ogata, "Efficient multitask learning with an embodied predictive model for door opening and entry with whole-body control,"
- Namiko Saito, Tetsuya Ogata, Hiroki Mori, Shingo Murata, and Shigeki Sugano, "Tool-use Model to Reproduce the Goal Situations Considering Relationship among Tools, Objects, Actions and Effects Using Multimodal Deep Neural Networks,"
- Minori Toyoda, Kanata Suzuki, Hiroki Mori, Yoshihiko Hayashi, and Tetsuya Ogata, "Embodying pre-trained word embeddings through robot actions," IEEE Robotics and Automation Letters, Volume 6, Issue 2, pp. 4225 - 4232, April 2021,
- Kanata Suzuki, Hiroki Mori, and Tetsuya Ogata, "Compensation for undefined behaviors during robot task execution by switching controllers depending on embedded dynamics in RNN,"
- Namiko Saito, Tetsuya Ogata, Satoshi Funabashi, Hiroki Mori, and Shigeki Sugano, "How to select and use tools? : Active Perception of Target Objects Using Multimodal Deep Learning,"
IEEE Robotics and Automation Letters, Volume 7, Issue 3, pp. 8550 - 8557, July 2022,
Proceedings of 2022 IEEE/RAS International Conference on Intelligent Robots and Systems (IROS 2022), Kyoto, Japan, October 23-27, 2022.
Science Robotics, Volume 7, Issue 65, April 2022.
Frontiers in Robotics and AI, September, 2021
Proceedings of 2021 IEEE International Conference on Robotics and Automation (ICRA 2021), Xi’an, China, May 30 – June 5, 2021.
IEEE Robotics and Automation Letters (RA-L), Volume 6, Issue 2, pp. 3475-3482, March 3rd 2021
Proceedings of 2021 IEEE International Conference on Robotics and Automation (ICRA 2021), Xi’an, China, May 30 – June 5, 2021.
IEEE Robotics and Automation Letters (RA-L), Volume 6, Issue 2, pp. 2517-2524, March 2021.
Proceedings of 2021 IEEE International Conference on Robotics and Automation (ICRA 2021), Xi’an, China, May 30 – June 5, 2021.
(Best Paper Award in Cognitive Robotics)
口頭発表(査読有)
- Hyogo Hiruma, Hiroshi Ito, Hiroki Mori, and Tetsuya Ogata, "Guided Visual Attention Model Based on Interactions Between Top-down and Bottom-up Prediction for Robot Pose Prediction,"
- Hideyuki Ichiwara, Hiroshi Ito, Kenjiro Yamamoto, Hiroki Mori, and Tetsuya Ogata, "Contact-Rich Manipulation of a Flexible Object based on Deep Predictive Learning using Vision and Tactility,"
- André Yuji Yasutomi, Hiroki Mori, and Tetsuya Ogata, "Curriculum-based Offline Network Training for Improvement of Peg-in-hole Task Performance for Holes in Concrete,"
- Wakana Fujii, Kanata Suzuki, Tomoki Ando, Ai Tateishi, Hiroki Mori, and Tetsuya Ogata, "Buttoning Task with a Dual-Arm Robot: An Exploratory Study on a Marker-based Algorithmic Method and Marker-less Machine Learning Methods,"
- Kelvin Lukman, Hiroki Mori, and Tetsuya Ogata, "Viewpoint Planning Based on Uncertainty Maps Created from the Generative Query Network,"
- Kanata Suzuki, Momomi Kanamura, Yuki Suga, Hiroki Mori, and Tetsuya Ogata, "In-air Knotting of Rope using Dual-Arm Robot based on Deep Learning,"
- André Yuji Yasutomi, Hiroki Mori, and Tetsuya Ogata, "A Peg-in-hole Task Strategy for Holes in Concrete,"
48th Annual Conference of the Industrial Electronics Society IECON 2022 Conference, Brussels, Belgium, October 17-20, 2022.
Proceedings of 2022 IEEE International Conference on Robotics and Automation (ICRA 2022), Philadelphia, USA, May 23 – 27, 2022.
Proceeding of IEEE/SICE International Symposium on System Integration (SII 2022), Jan. 9-12, 2022.
Proceeding of IEEE/SICE International Symposium on System Integration (SII 2022), Jan. 9-12, 2022. (Best Paper Award)
Annual Conference of the Japanese Society for Artificial Intelligence (JSAI 2020), Advances in Intelligent Systems and Computing (AISC), vol. 1357, pp. 37-48, Springer, July, 2021.
Proceedings of 2021 IEEE/RAS International Conference on Intelligent Robots and Systems (IROS 2021), Prague, Czech September 27-October 1, 2021.
Proceedings of 2021 IEEE International Conference on Robotics and Automation (ICRA 2021), Xi’an, China, May 30 – June 5, 2021.
口頭発表(査読無)
- Gangadhara Naga Sai Gubbala, Masato Nagashima, Hiroki Mori, Young ah Seong, Hiroki Sato, Ryuma Niiyama, Tetsuya Ogata "Design of 3-dof 2-link inflatable collaborative robot arm with internal drop stitch structure"
- Hiroki Mori, Hyogo Hiruma, Hiroshi Ito , Tetsuya Ogata "Tool embodiment via Deep predictive active attention: Emergence of an attention module for “end-effector” regardless of a robotic body or a tool"
- 一藁秀行, 伊藤洋, 山本健次郎, 森裕紀, 尾形哲也 「モダリティ注意による深層予測学習の解釈性とノイズロバスト性の向上」
- 飯野寛人, 安藤智貴, 鳥島亮太, 森裕紀, 高橋城志, 山口正一朗, 岡野原大輔, 尾形哲也 「GANs を用いた多自由度ロボットの任意の最適化基準に基づく軌道計画」
- 森裕紀, 孟恬伊, 菅佑樹, 浅野伸, 杉浦篤, 小松洋音, 尾形哲也 「深層学習を用いたナット締め作業におけるナット穴からのカメラ画像に基づいたボルトへの誘導」
- 竹本敦, 寺田哲也, 岡﨑俊実, 森裕紀, 尾形哲也 「予測符号化理論に基づく深層学習モデルを用いた車載スピードメータの予測性評価」
- 伊藤洋,一藁秀行,山本健次郎,森裕紀,尾形哲也 「言語指示に基づいた注意予測による把持動作生成」
- 一藁秀行,伊藤洋,山本健次郎,森裕紀,尾形哲也 「触覚センサと深層学習を用いた布バッグのジッパー開け動作」
- 藤井稚菜,鈴木彼方,森裕紀,尾形哲也 「双腕ロボットによるボタンかけ動作の実現 – 再帰神経回路モデルによるボタン通し動作の生成-」
- 藤井稚菜,鈴木彼方,安藤智貴,舘石藍,森裕紀,尾形哲也 「双腕ロボットによるボタンかけ動作の実現 – サブタスクに分割したタスク動作設計とマーカ認識による各動作の実行-」
- 金村杏美,鈴木彼方,菅佑樹,森裕紀,尾形哲也 「双腕2指ロボットによる深層予測学習を用いた紐結び動作の実現」
- 菅佑樹,森裕紀,尾形哲也 「データ変換に着目したミドルウェアモデルを用いた移動ロボット向けフレームワークの開発」
日本ロボット学会第40回学術講演会, 2J2-01, 東京大学, 2022年9月6日(火)
「深層予測動的注意モデルによる道具身体化:身体と道具に関わらない「エンドエフェクタ」注意モジュールの創発」
NEURO2022, 2O09a1-04, 第9会場 (ラグナガーデンホテル羽衣:中), 2022年7月1日(金)
日本機械学会ロボティクスメカトロニクス講演会,2A2-H11, 2022年6月3日.
日本機械学会ロボティクスメカトロニクス講演会,2A2-H10, 2022年6月3日.
計測自動制御学会システムインテグレーション部門講演会SI2021,1D2-05, 2021年12月15日.
自動車技術会 秋季大会 学術講演会, オンライン, 2021年10月14日.
日本機械学会ロボティクスメカトロニクス講演会,1P3-D05, 2021年6月7日.
日本機械学会ロボティクスメカトロニクス講演会,1P3-D04, 2021年6月7日.
日本機械学会ロボティクスメカトロニクス講演会,1P3-D03, 2021年6月7日.
日本機械学会ロボティクスメカトロニクス講演会,1P3-D02, 2021年6月7日.
日本機械学会ロボティクスメカトロニクス講演会,1P3-D01, 2021年6月7日.
日本機械学会ロボティクスメカトロニクス講演会,1P2-D08, 2021年6月7日.
主宰者経歴▲
- 早稲田大学
-
2017年4月 早稲田大学次世代ロボット研究機構 着任
- セルジー・ポントワーズ大学(フランス)
-
2016年4月-2017年3月
University of Cergy-Pontoise (現 CY Cergy Paris University), ETIS Lab Researcher
- 大阪大学
-
2011年4月着任 2016年3月退職
大阪大学 知能・機能創成工学専攻 助教
所属:創発ロボティクス研究室 - 博士(情報理工学)取得
-
2011年3月 東京大学大学院 情報理工学系研究科 知能機械情報学専攻より
博士論文タイトル:ヒト胎児モデルシミュレーションに基づく触覚を通した自己組織的行動発達構成論 - 科学技術振興機構 ERATO 浅田共創知能システムプロジェクト
対人共創知能グループ(國吉グループ) 研究員 - 2009年10月着任 2011年3月退職
- 東京大学大学院 情報理工学系研究科 知能機械情報学専攻 博士後期課程
-
2006年4月入学 2009年9月単位取得退学
所属研究室:知能情報システム研究室(國吉・原田研究室)
- 豊橋技術科学大学大学院 工学研究科 情報工学専攻 博士前期課程
-
2004年4月入学 2006年3月修了
所属研究室:システム応用研究室(宇野・福村研究室)
- 豊橋技術科学大学 工学部 情報工学課程
-
2002年4月3年次編入学 2004年3月卒業
所属研究室:システム応用研究室(宇野・福村研究室)
- 岐阜工業高等専門学校 電気工学科
-
1997年4月入学 2002年3月卒業
所属研究室:出口研究室